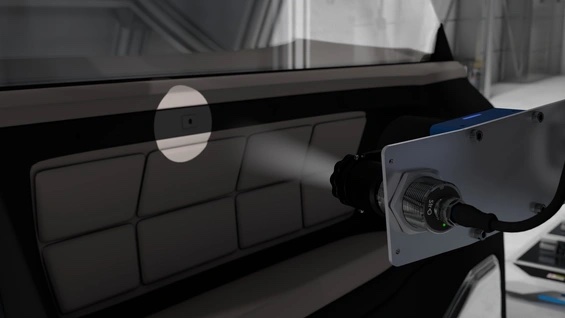
Les spots Z-SPOT sont compacts et légers, ce qui permet de les fixer directement sur le bras robotisé. Lorsque le cobot se déplace pour scanner différentes pièces, les spots assurent un éclairage constant et précis, permettant à la caméra de détecter avec précision chaque élément de montage.